概要
ミッション
情報化社会の次に到来すると期待されているのが、ロボットが生活支援を行うロボット化社会です。特に、人と関わるロボットは、次世代の情報メディアとしても重視されています。少子超高齢社会の日本において、ロボット技術やメディア技術でQOL(Quality Of Life)を補償することは必要不可欠なのです。
この問題に対して大阪大学は、世界に先駆け、人と関わるロボット開発に取り組み、ロボット研究において相互作用(interaction)と呼ばれる新しい研究分野を創成し、世界の研究を牽引してきました。このような、人と関わるロボットに代表される知能システムは、人間にサービスを提供する実用性を持つだけでなく、人間をモデル化し、人間とロボットの関わりを調べる新たな研究方法をも提供してくれます。
本拠点のミッションは、人間に親和的な知能システムを実現し、人間とロボットが共生する社会を実現することにあります。この目的を達成するために、人間や人間社会のマクロな性質を理解する新たな手段として、知能ロボットに代表される知能システムの開発に取り組み、人間の基本問題である知能、身体性、マルチモーダル統合、意図欲求、意識、社会関係等の解明および社会実証研究を展開していきます。
研究概要
本拠点の研究は、下図に示すように、互いに密に連携する5つの研究グループから構成されています。人間をモデル化し構成的に理解するための人間に酷似したアンドロイドや、人間と関わり人間のパートナーとなるロボットを実現する知能ロボット研究、その知能ロボットや情報システムを用いて、知能や身体性等の人間の基本問題の解明を目指す認知・脳科学研究、ロボットの知覚を実現し、人間とロボット等の知能システムの複雑な社会的関係を計測・解析するセンシング研究、そしてこれらの大規模な社会実証を可能にする情報ネットワーク研究と、さらには人間や社会と技術の関わりを考える社会・倫理・哲学研究です。
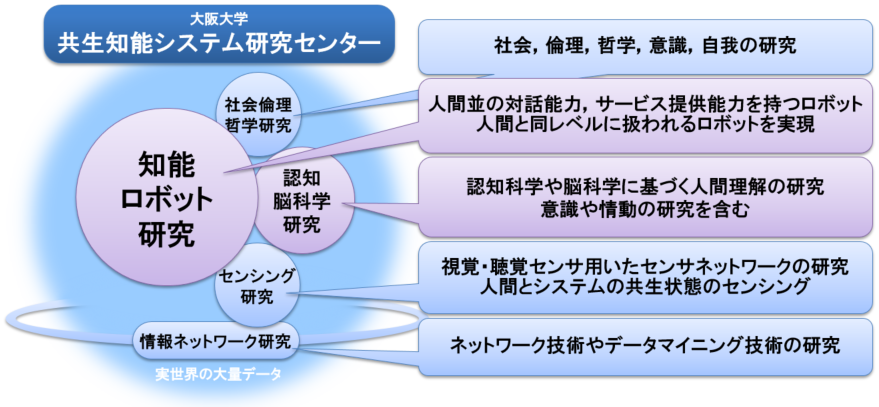
知能ロボット研究は主に認知・脳科学研究と連携しながら、ロボットによる人間のモデル化という構成的方法によって、知能、身体性、マルチモーダル統合、意図欲求、意識、社会関係等の人間の基本問題を明らかにしていきます。その研究を支えるのが、センシング研究と情報ネットワーク研究です。両者は大阪大学のキャンパスや大阪市内において、開発された知能システムの機能を実際の社会で検証し、人間や社会の新たな科学的基本問題を探索する実証実験環境を拡充します。そして、社会・倫理・哲学研究は、それらの研究全てを俯瞰する観察や実験を共にすることで、ロボットに支援される人間社会の問題を明らかにします。
研究計画
本拠点では、5年目及び10年目の研究目標を以下のように計画しています。
5年目の中間目標
特定のタスクにおけるサービス提供機能や対話機能が、人間によるものと代替可能とみなされ、人と共生する知能システムの要素となるアンドロイド、ロボット、情報メディア、知的センシングシステムを実現すると共に、それを利用して、脳の高次機能である知能、身体性、マルチモーダル統合、意図欲求、意識、社会関係等の構成的方法による基礎研究に取り組み、人間理解と同時に実用的システムを実現します。
10年目の最終目標
特定の日常的場面において人間のパートナーとして受け入れられる知能システムを実現すると共に、それらを利用して、知能等の構成的方法による基礎研究を通した人間理解をさらに進めます。同時に、新たな社会に必要となる社会学、倫理学、哲学を研究します。
構成的方法を用いた、より具体的な項目毎の研究目標は以下の表の通りです。
| 知能 | 現在 | 深層学習、強化学習など大量データを基にした機械的学習と脳の部分機能との対応 |
|---|---|---|
| 5年後 | 脳におけるオンライン学習・少数データ学習の機能解明とロボットを用いた検証 | |
| 10年後 | 概念を学習できる脳構造の解明とロボットによる検証 | |
| 身体性 | 現在 | 脳の感覚や運動機能を含む身体性の現象解明や脳・身体相互適応モデルの提案 |
| 5年後 | 複雑な身体(複雑な内部状態)や多様な感覚(外部観察)に基づく身体表象や機能獲得過程のモデル化 | |
| 10年後 | 獲得した計算モデルのロボットへの実装とモデルの有効性検証 | |
| マルチモーダル統合 | 現在 | 比較的単純な環境における複数モダリティ統合モデルの提案とロボットによる検証 |
| 5年後 | 人間との関わりを通した複数モダリティによる学習メカニズムの提案とロボットの実現 | |
| 10年後 | 情報が足りないモダリティを想像で補う機能の考案と、存在感を感じることができるロボットの実現 | |
| 意図・欲求 | 現在 | 意図・欲求を考慮した表面的感覚行動グラフに基づくモデル構築とロボットへの実装によるモデル検証 |
| 5年後 | 意図・欲求の内部状態を持つ感覚行動制御モデルの構築とロボットへの実装によるモデル検証 | |
| 10年後 | 意図・欲求を学習・変更できるモデルへの拡張と、ロボットへの実装および人間との関わりを通した検証 | |
| 意識 | 現在 | 客観的現象としての意識の量に関する計算仮説 |
| 5年後 | 学習するロボット独自の意識構造の仮説とロボットを用いた仮説検証 | |
| 10年後 | 人間の意識構造の仮説とロボットを用いた仮説検証 | |
| 社会関係 | 現在 | 複数ロボットを用いた表面的対話機能の実装と対話の本質的理解 |
| 5年後 | 複数意図を同時に扱う人間レベルの表面的対話機能の実現 | |
| 10年後 | 意図や欲求を更新することを目的とした対話の実現と少人数社会心理学の確立 |
これら具体的な研究項目に関するこれまでの研究業績と、その発展の方向性は、以下の通りです。ここでは特に、構成的方法を用いたこれまでの研究業績について、これまでの研究例を研究項目毎に挙げながら説明します。
知能
例えば、大脳基底核の脳解析の結果、強化学習が安全を同時に学習していることがわかり、シミュレーションで構成的にそのメカニズムを確認しました。その結果、安全を確保する行動が再現され、脳の機能を説明することができました。 このような研究を発展させ、人間の脳機能の解明を目指すと共にその結果を強化学習や深層学習に取り入れ、より人間に近い学習アルゴリズムを実現します。
身体性
MEG(Magnetoencephalography)でロボットアームを制御するシステムを構成し、脳のどの部位の信号を使うかによって、幻肢痛が増えたり減ったりするかを調べました[Nature communications、 文献7]。また、人間の脳と人間らしい体を持つアンドロイドをBMIで結び付けることにより、自己身体受容感覚が無くても、視覚だけで動きを観察することで、人間の脳はアンドロイドを自分の体のように受け入れることを確認しました。 このような研究を発展させ、脳の感覚や運動機能を含む身体性現象の解明を行い、機能をモデル化し、ロボットに実装します。
マルチモーダル統合
人間の時間の意識が様々なモダリティの信号から脳で構成されることを示しました。すなわち、最も単純な2信号の順序に関しては、2つの信号の空間内の位置と2つの信号の間に生じる仮現運動から再構成されるというモデルを提案し、検証しました。 この研究をさらに複雑なタスクに発展させ、アンドロイドによって人間の時間感覚を再現します。また、このような研究を他のモダリティに拡張し、人間の複数モダリティの統合原理に関するモデルを獲得し、ロボットに実装します。
意図欲求
欲求や意図に基づく自律対話機能を、人間に酷似したロボットであるアンドロイドに実装し、人との関わりを通して、アンドロイドが従来よりも人間らしくなることを確認しました。 この研究をさらに発展させ、より複雑な意図や欲求を扱えたり、また人との関わりの中で意図を獲得することができるアンドロイドを実現します。
意識
自己意識を構成するとされる公的自己意識と私的自己意識の二つを表現できるロボットを実装し、自己意識に関する部分的モデルを獲得しました。このような研究に、さらに計算論的なアプローチを加え、人間とロボットそれぞれの意識のメカニズムの解明に取り組みます。
社会関係
顔の顕著性に基づいて、社会的な動画を見るときの視線の動き予測モデルを構成し、そのモデルが人間の視線の動きの60%を説明することを示しました。このような基礎研究をより現実的な場面への研究に発展させ、ロボットにその機能を実装します。
これらの業績に加え、研究達成目標を実現するために重要なのは、拠点長を中心とするグループの圧倒的なロボットシステムの開発力です。

加えて、本拠点はコンピュータビジョン技術を用いた人間行動センシング技術や、生体機能模倣型の適応的で頑強な情報ネットワーク技術に関して、国内有数の技術を兼ね備えています。さらに、本拠点において社会・倫理・哲学研究に取り組む研究者は、これらの技術と人間や社会との関係において、パイオニア的研究に取り組んできた実績があります。
社会的インパクト
本拠点では、センシング技術と情報ネットワークやセンサネットワークに支えられた、人間と共生できる知能システム、すなわち、人間が人間のように関われる知能ロボットや知能情報メディアを実現し、それを用いた脳科学、認知科学、社会心理学、社会学、倫理学、哲学の研究に取り組みます。そして、大学キャンパス内、大阪市内に実証実験の場を確保し、実証実験を通してその効果を確認すると共に、到来するロボット化社会における社会的な問題を同時に研究します。
10年後の研究期間終了時には、人と親和的に関わるロボットや、ロボットの活動を支え、人間とロボットの関係を観察するセンサネットワークが実現されるとともに、実証実験を通じて、その実用性が確認されることを目標としています。また同時に、そのようなロボットと関わる人間の機能、特に、知能、身体性、マルチモーダル統合、意図欲求、意識、社会関係に関する理解が深まるとともに、明かされる機能はロボットに実装され、ロボットはより人間に近く、より人間に親和性の高いものとなります。
具体的には、日常的なタスクを遂行しながらも、人間との関わりを通して新たな対話や行動を学習するロボット、意図や欲求や意識や自我を感じさせるロボットの実現を目指します。このようなロボットの実現は人工知能研究やロボット研究における世界的な研究課題であるとともに、これらを実現することで、パソコンやスマホが世の中を変えたように、ロボットが再び世の中をさらに進化させることになります。下図は、その未来予想図です。
研究の拠点
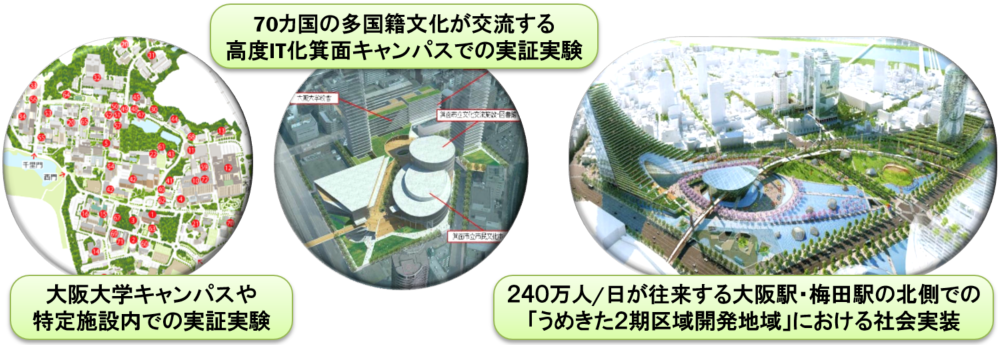
豊中キャンパス及び吹田キャンパスに既存の研究スペースを集積し、それぞれ1000平米ずつの拠点スペースを準備します。それぞれのキャンパスにおける拠点の研究スペースは極力壁で隔てず、様々な背景を持つ研究者が日常的に協働できる環境を作ります。
また、企業や自治体と常に連携するための実証実験部門を設置し、実証実験を常に実施しながら社会から研究へのフィードバックを得ます。このために、下図に示すように、実証実験フィールドとして、大阪大学吹田キャンパス、豊中キャンパス、箕面新キャンパスに合計約5万平米のスペースを確保し、センサネットワークなどのインフラを設置します。さらには、240万人/日が往来する大阪駅・梅田駅の北側での「うめきた2期区域開発地域」における実社会での実証実験へと発展させます。